Our software solution
We aim to develop a software framework and ancillary tools for provisioning and orchestration of swarms of autonomous and semi-autonomous agents.
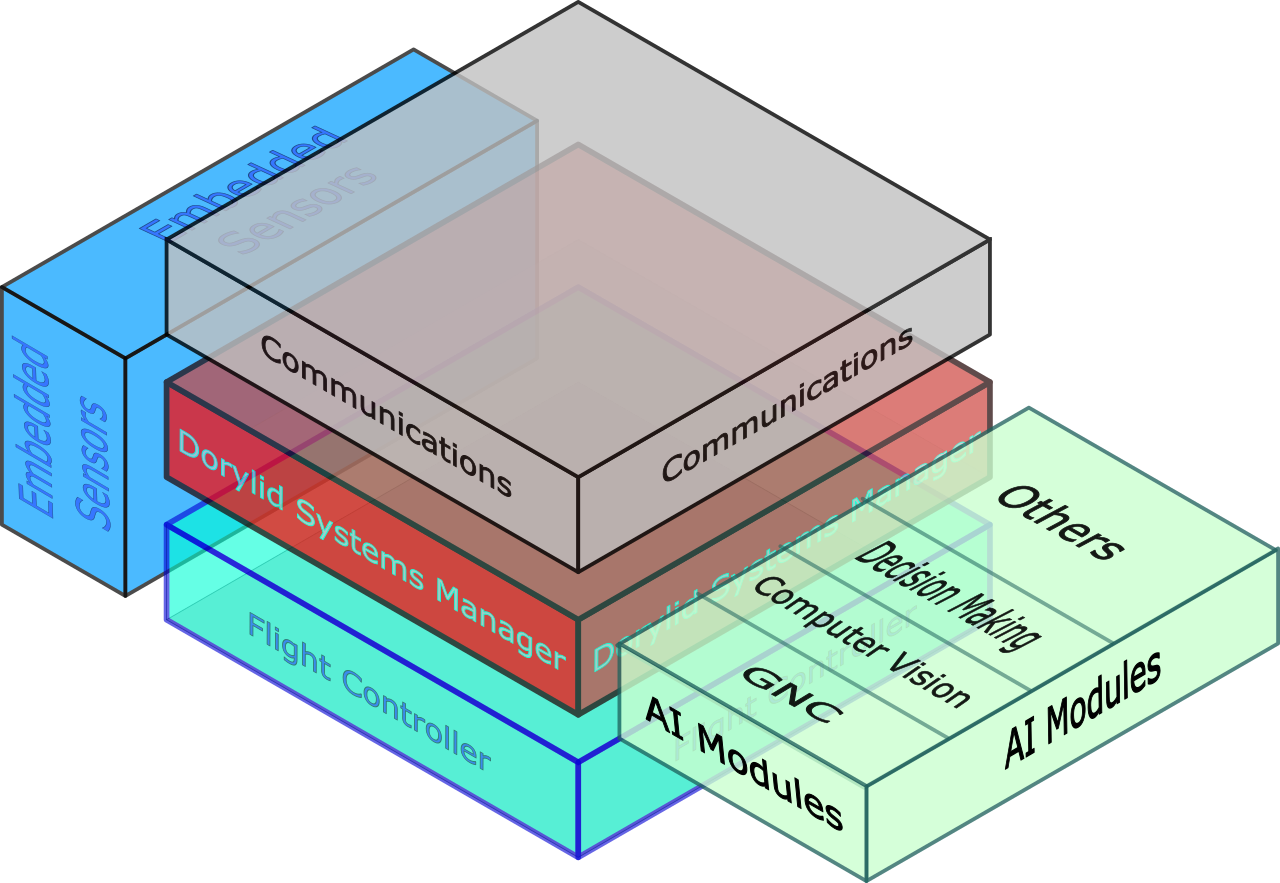
The main component of this software framework is meant to run on every member of a swarm as an intermediary between the communication layer, AI modules, sensors and flight controller and/or autopilot, and it is designed to contribute along two different dimensions, providing convenient integration of AI modules often developed in isolation (e.g., vision, navigation, decision-making, etc.) at agent level while also supporting the implementation of predefined autonomous behaviors at swarm level.
As such, this component can roughly be conceptualized as both a “swarm operating system” as well as an agent-level component manager.
Together with a resource provisioning component and a user interface, it constitutes the core elements of a complete swarm management system, the kind of which is absolutely essential to ensure feasibility and actual deployment of swarm applications.
From an architectural perspective, our solution is comprised of two well-delineated distributed technical components:
1) A behavioural system with a spoke-hub architecture to distribute and orchestrate tasks among
swarm members within the context of the swarm-level mission.
2) A provisioning system to manage and monitor swarm resources, capable of reacting to adverse events (e.g., agent destruction, network splits, etc.).
This architecture is inspired by and adapted from concepts and algorithms developed for resource management in cloud / high-performance computing. It is thus able to support all stages of the development lifecycle of swarm systems.
Leveraging our practical experience in cloud/HPC as well as AI and physics simulation, we are ideally placed to use our framework to support the development of customized swarm systems, as well as ancillary tools and applications.
Important note:
The current international context (see here) forces us to frame our services in terms of defence applications. This should not discourage you from contacting us if your idea is destined to civilian use. We are convinced that many applications are begging to be developed in e.g., waste management, construction, etc.
The four core concepts that guide our developments
Building hierarchical, distributed and composable architectures that can run on heterogeneous hardware platforms
Physical AI can’t evolve if it remains stuck with task specific end-to-end training. Functional modularity and composability are obvious solutions, yet hard-to-implement features in modern AI-powered autonomous systems such as robots, drones, etc. To address this issue, we build hierarchical, distributed and composable software architectures that can run on heterogeneous hardware platforms. We can adapt them to your requirements, interface them with specialized software modules (e.g., navigation, computer vision, etc.) and help you create prototypes and proofs-of-concept for your use cases.
Seamlessly linking in silico training and deployment
Physical AI is touted to become the next business juggernaut. However, the reliance on data availability of most AI training paradigms entails that synthetic data must be used. Swarm systems in particular, with their multiple agents and varied use cases, cannot afford validation and testing only in the real world – this is especially true of defense applications, where attrition is to be expected.
Our software solutions are designed in such a way that the same swarm control architecture can be used during in-silico training, testing, and deployment in the field. After implementing our control software on your swarm system, we can thus leverage our experience in Ai & co-simulations to test and validate it in silico, and then evaluate the sim-to-real gap with physical prototypes.
“Iterate fast, fail cheap”
In business, competitors are perpetually seeking the to improve and outcompete you. On the battlefield, our adversaries keep adapting their tactics as a matter of survival – and victory. Whatever your situation, there is only one truth. When the time comes, you’d better be first past the post.
We can help with that. By leveraging virtual training with the same software used in actual deployment, we empower your teams to test – and fail when relevant – faster. Remember, anything that can’t work in simulation won’t work in the real world.
Achieving organic collaboration within the swarm between any number of agents and human pilots / supervisors
From an efficiency perspective, we need to do away with the “1 pilot – 1 drone” paradigm. This is particularly true in conflict situations where drone technology needs to compensate numerical imbalance. A swarm requires specific interfaces with its users, enabling them to dynamically choose and adjust their contribution throughout the mission time frame.
Additionally, from an ethical perspective, AI needs to be guided and controlled by users-in-the-loop in order to circumscribe its actions within acceptable limits. It is clear that the future belongs to autonomous systems, but our duty is to make sure that a human can intervene to e.g., avoid civilian casualties in a defense context.
From a usability perspective, the name of the game is to let individuals control swarm resources when desired while at the same time enabling fully autonomous agent management and task execution when needed, and to make the transition between these two control modes as smooth and seamless as possible.
We can help you drive adoption by developing new human-machine interfaces and apposite processes. We will help you deliver the most natural and unobtrusive user experience for your clients.